栗を収穫し集荷場所まで運ぶ自走式ロボットの実演会を2月9日、JAたまな春富選果場で開きました。
生産者やJA指導販売担当者が参加。収穫にかかる作業負担の削減などの省力化が目的で、生産量の増加や産地維持にも期待がかかっています。
ロボットは熊本県立大学環境共生学部の松添直隆教授が国の事業「戦略的スマート農業技術の開発・改良」の支援を受け、電気柵メーカー末松電子製作所らと共に開発し、各地で実証実験を重ねています。
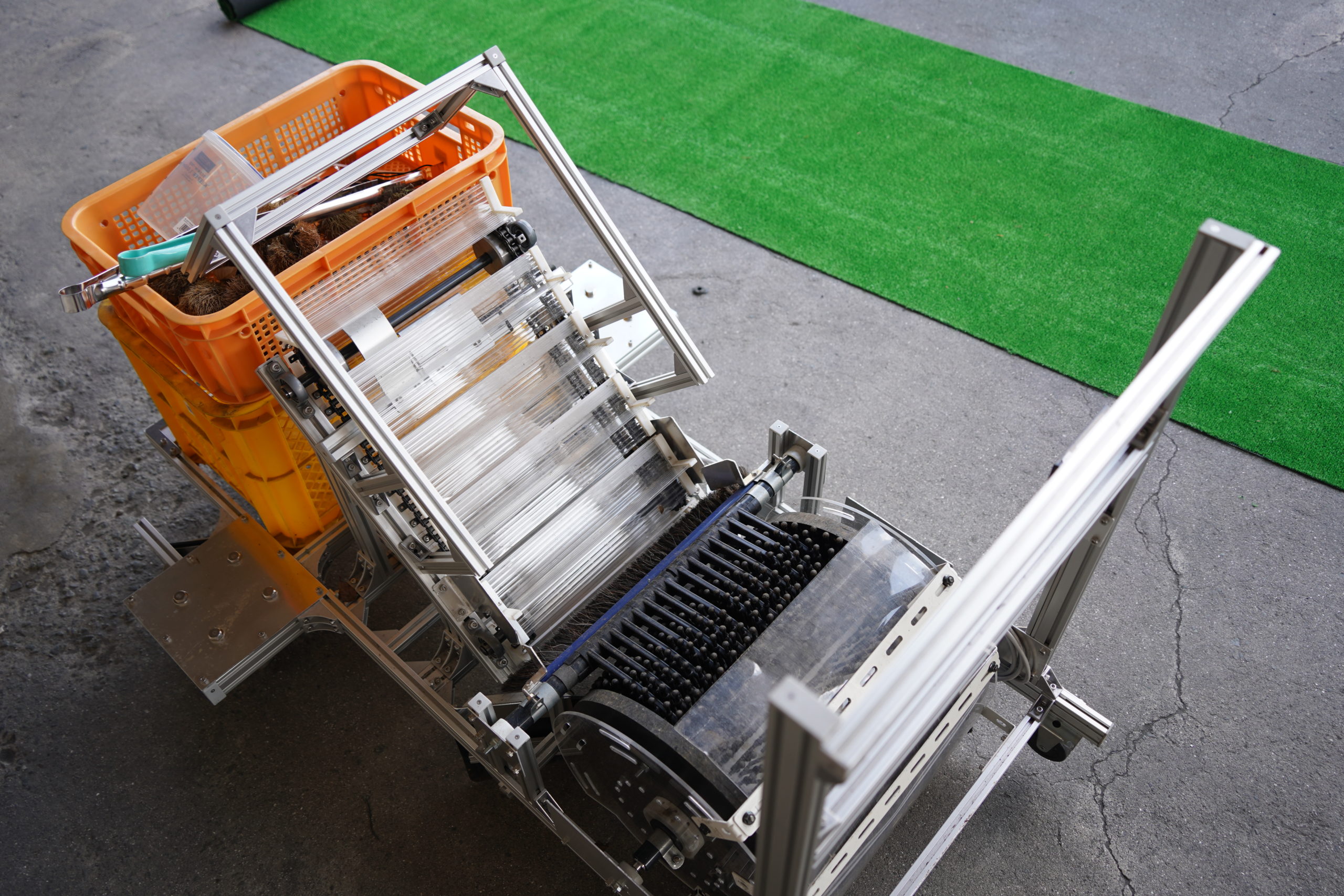
収穫機には円筒状の突起を備えたブラシがあり、柔軟性や形状などを変えることでイガ栗と実を同時に挟み込み収穫します。手押しでも利用可能ですが、自動走行できる運搬ロボットでけん引することで、更なる作業効率の向上と収穫時間の短縮を狙っています。
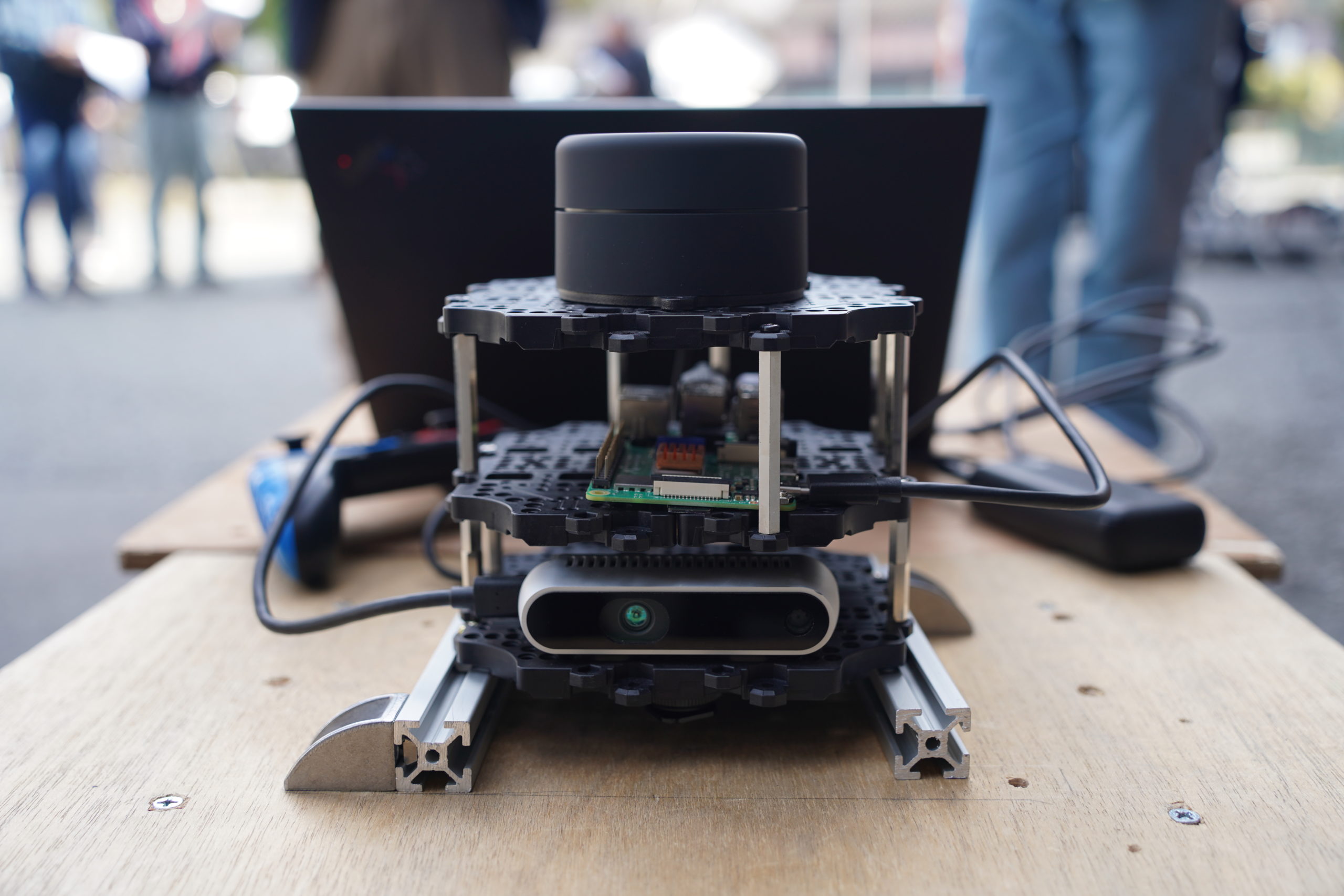
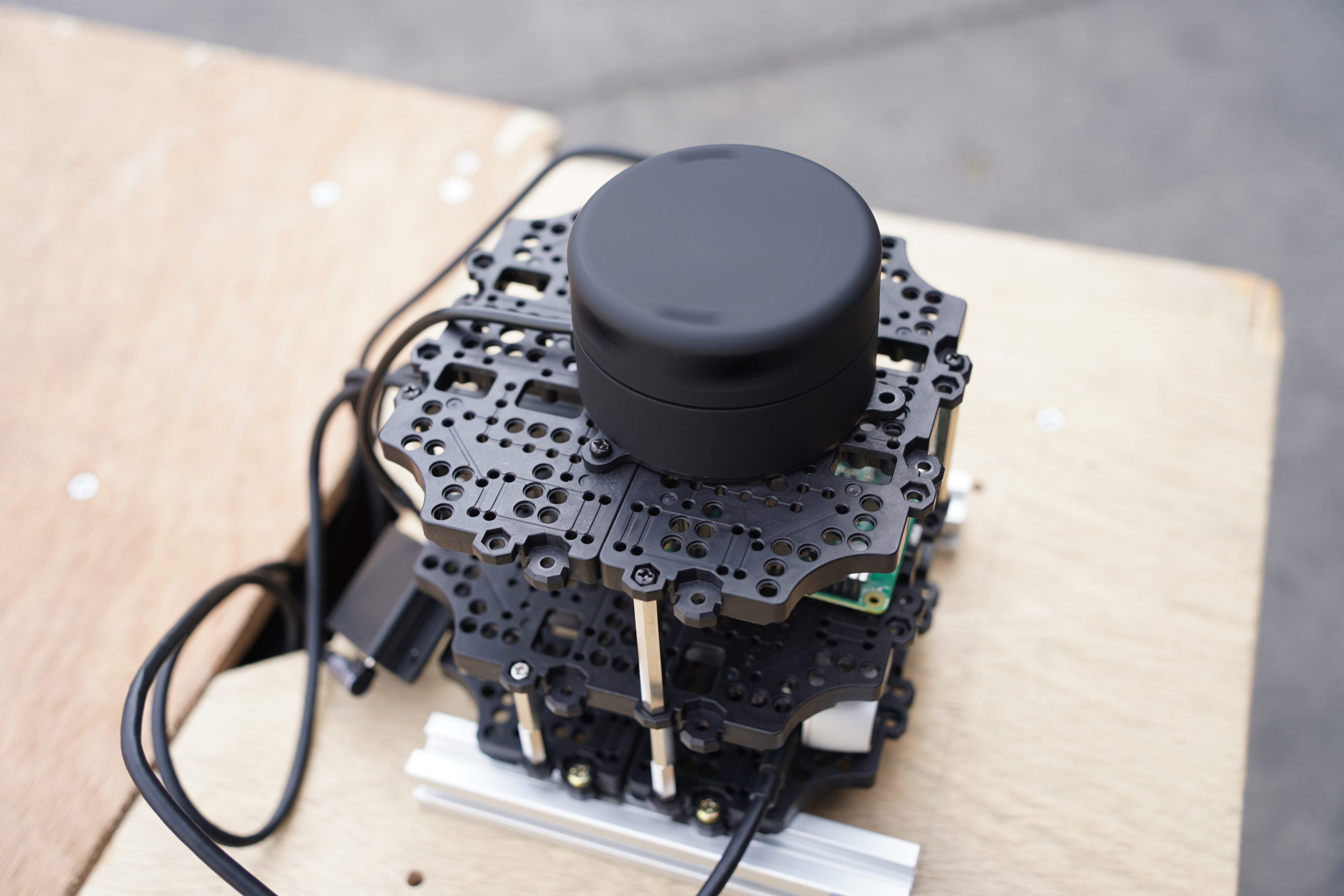
ロボットには周辺状況を把握する側域センサーを装備し、栗の木に設置する白黒のパターンからなる画像(ARマーカー)を認識することで、自己位置を推定しながら走行することができます。
管内にはサイズが大きい「利平」などの栗も栽培されています。参加者からは混在する品種に対応できるブラシへの改良や収穫時のコンテナ運搬への対策など、様々な意見がでました。

円筒状の突起を備えたブラシ 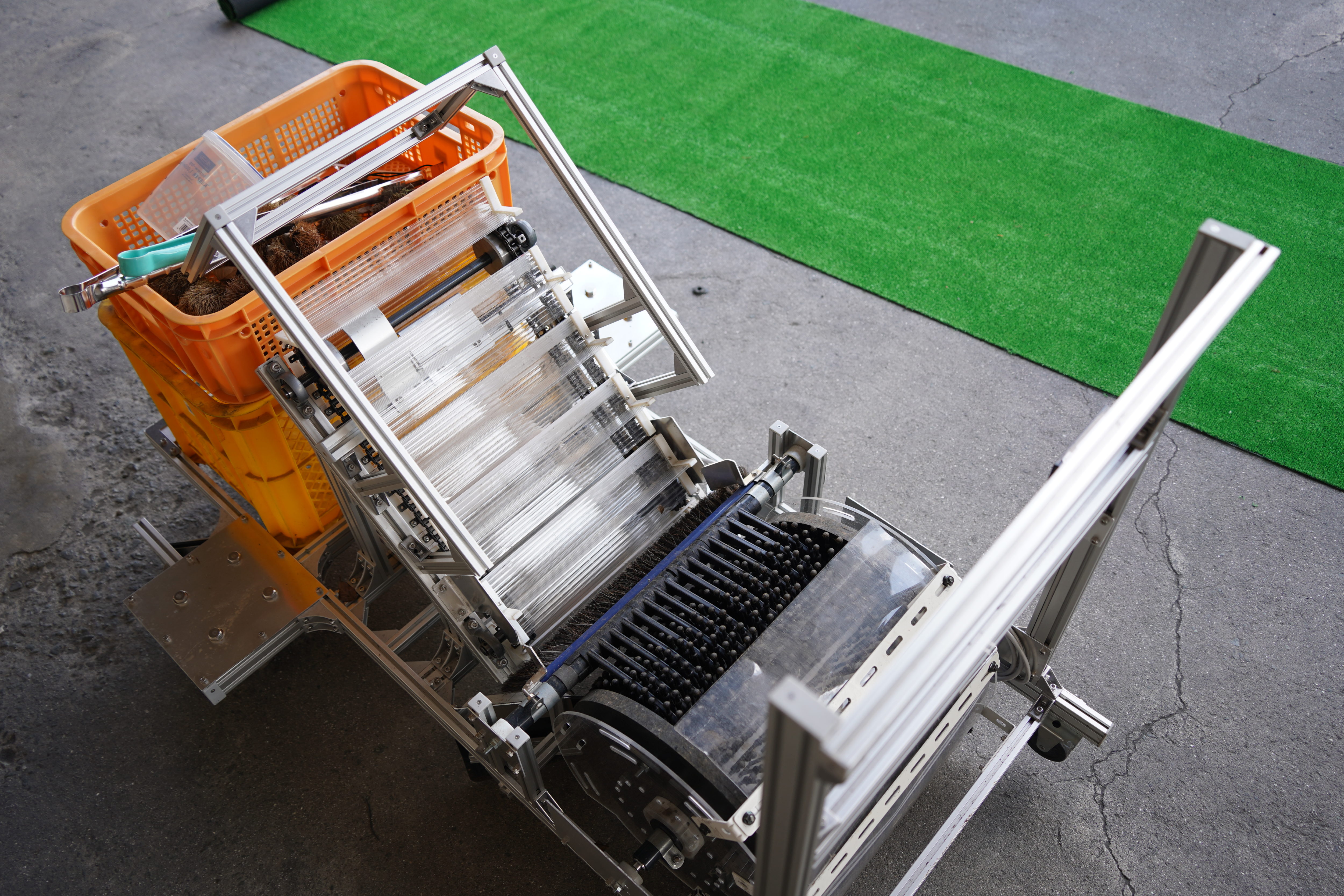
栗収穫機 
実演試験 

運搬ロボットによる試験 
ARマーカー 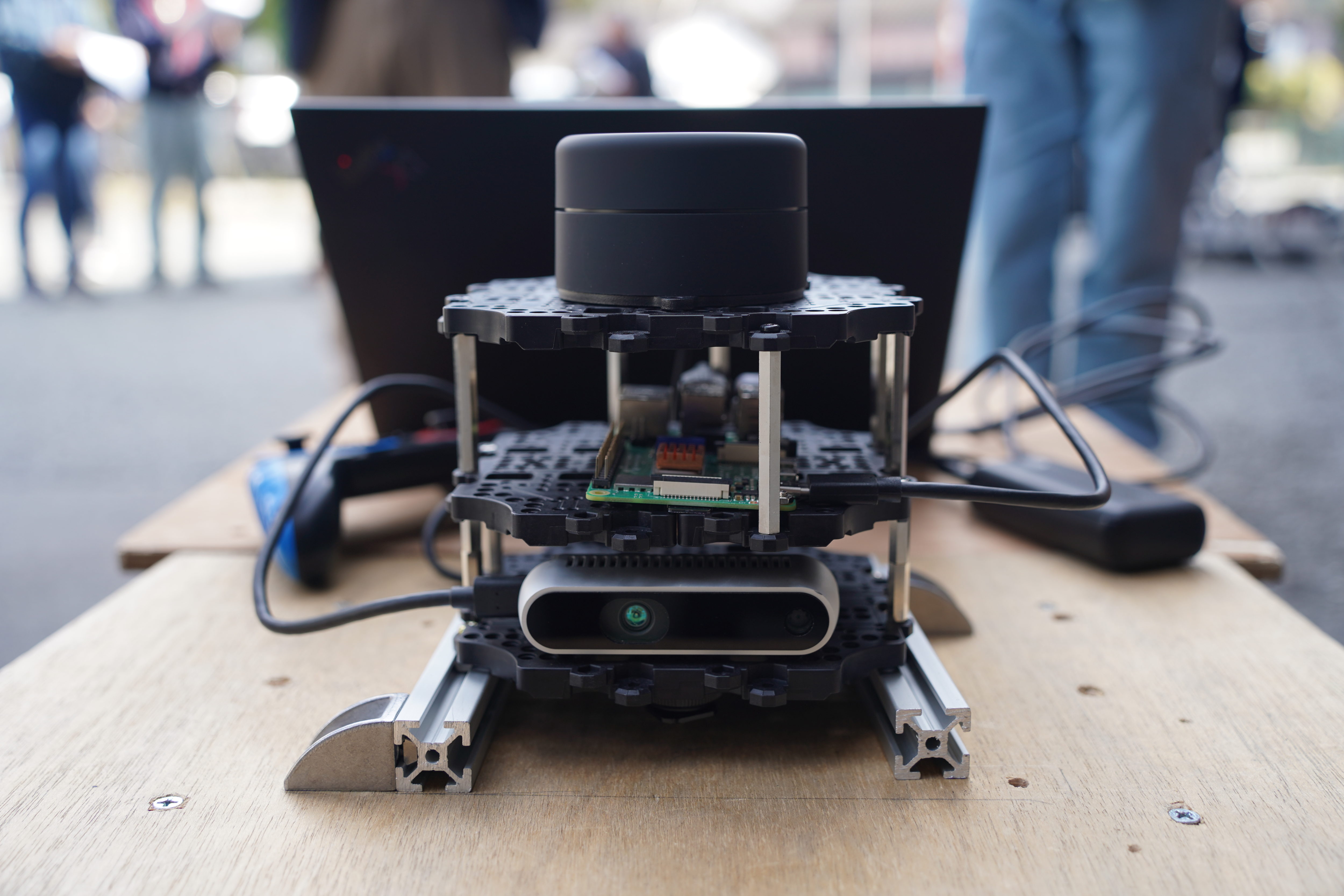
ロボットに付いているカメラ 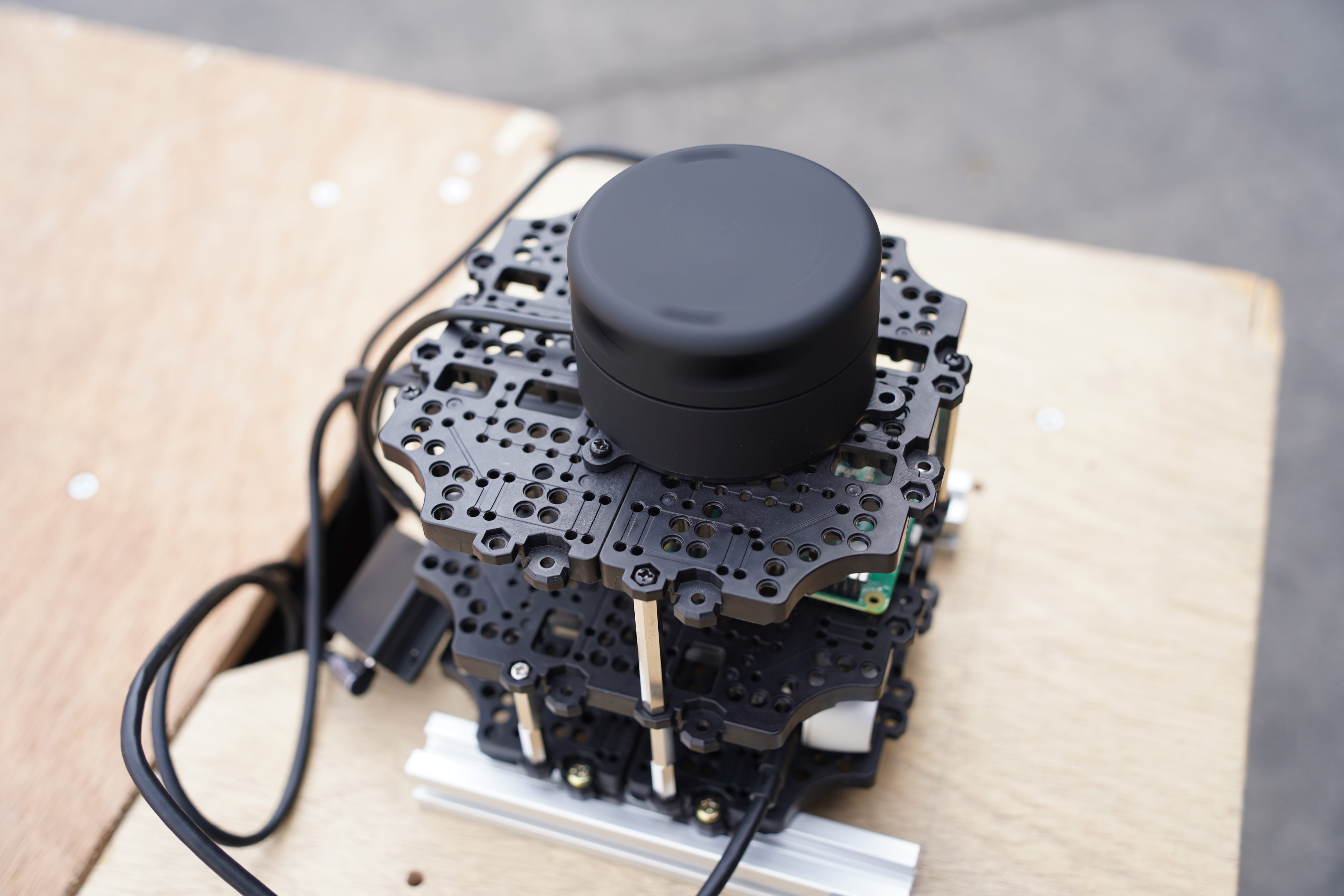
自己位置を測定する








.jpg)



-scaled.jpg)

